home
projects
contact
Projects
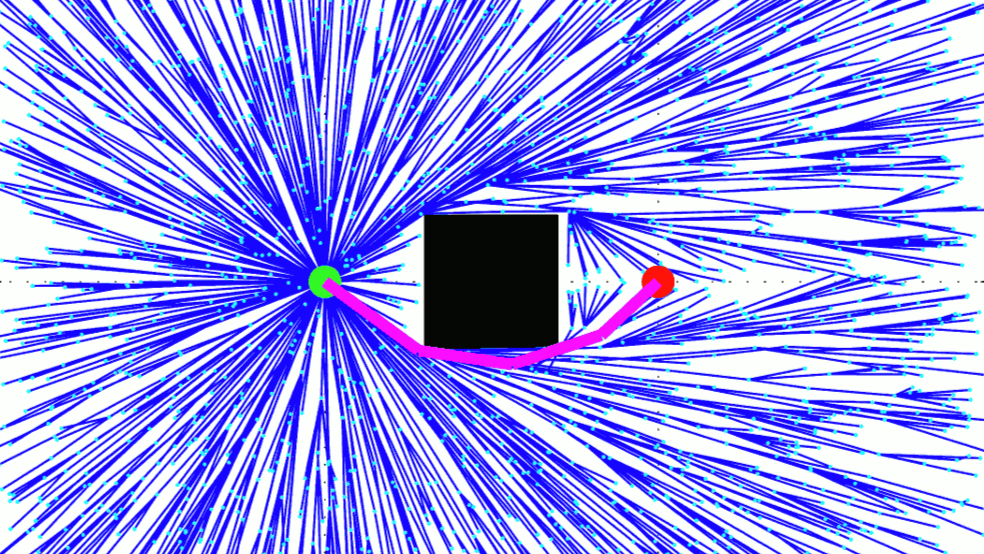
Parallel Pathfinding with RRT*